Abstract
In this project, we present an evaluation of a number of probabilistic algorithms for localization of autonomous underwater vehicles (AUVs) using bathymetry data. The algorithms, based on the principles of the Bayes filter, work by fusing bathymetry information with depth and altitude data from an AUV. Four different Bayes filter-based algorithms are used to design the localization algorithms: the Extended Kalman Filter (EKF), Unscented Kalman Filter (UKF), Particle Filter (PF), and Marginalized Particle Filter (MPF). We evaluate the performance of these four Bayesian bathymetry-based AUV localization approaches under variable conditions and available computational resources. The localization algorithms overcome unique challenges of the underwater domain, including visual distortion and radio frequency (RF) signal attenuation, which often make landmark-based localization infeasible. Evaluation results on real-world bathymetric data show the effectiveness of each algorithm under a variety of conditions, with the MPF being the most accurate.
Bathymetry Data
We selected four lakes that met the following criteria:
- were accessible to run field trials,
- possessed an asymmetrical structure,
- were of a reasonable size to operate an AUV.
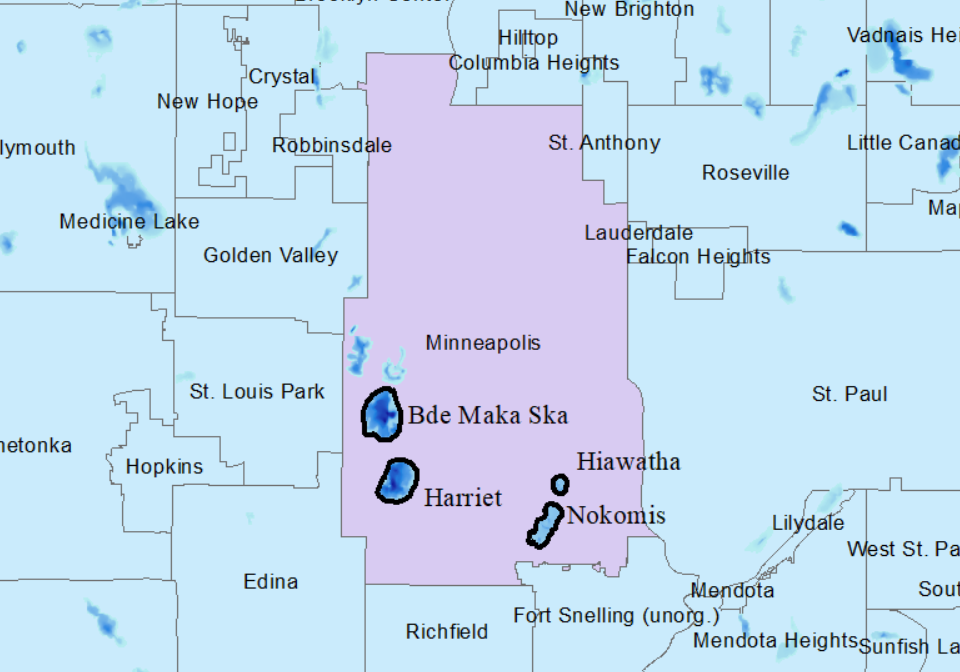
The lakes are Lake Bde Maka Ska, Lake Nokomis, Lake Hiawatha, and Lake Harriet. We then obtained the bathymetry data of the lakes from the MN DNR and each lake has a grid size of 5m. The bathymetry data had height measurements in feet, but we converted them to meters for our experiments.
 |
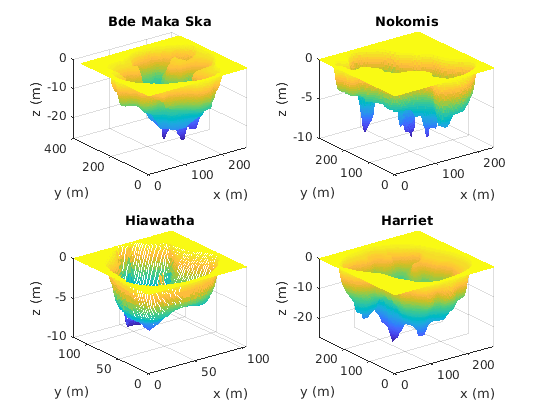 |
| Selected lakes in the map | 3D plots of the selected lakes |
Results
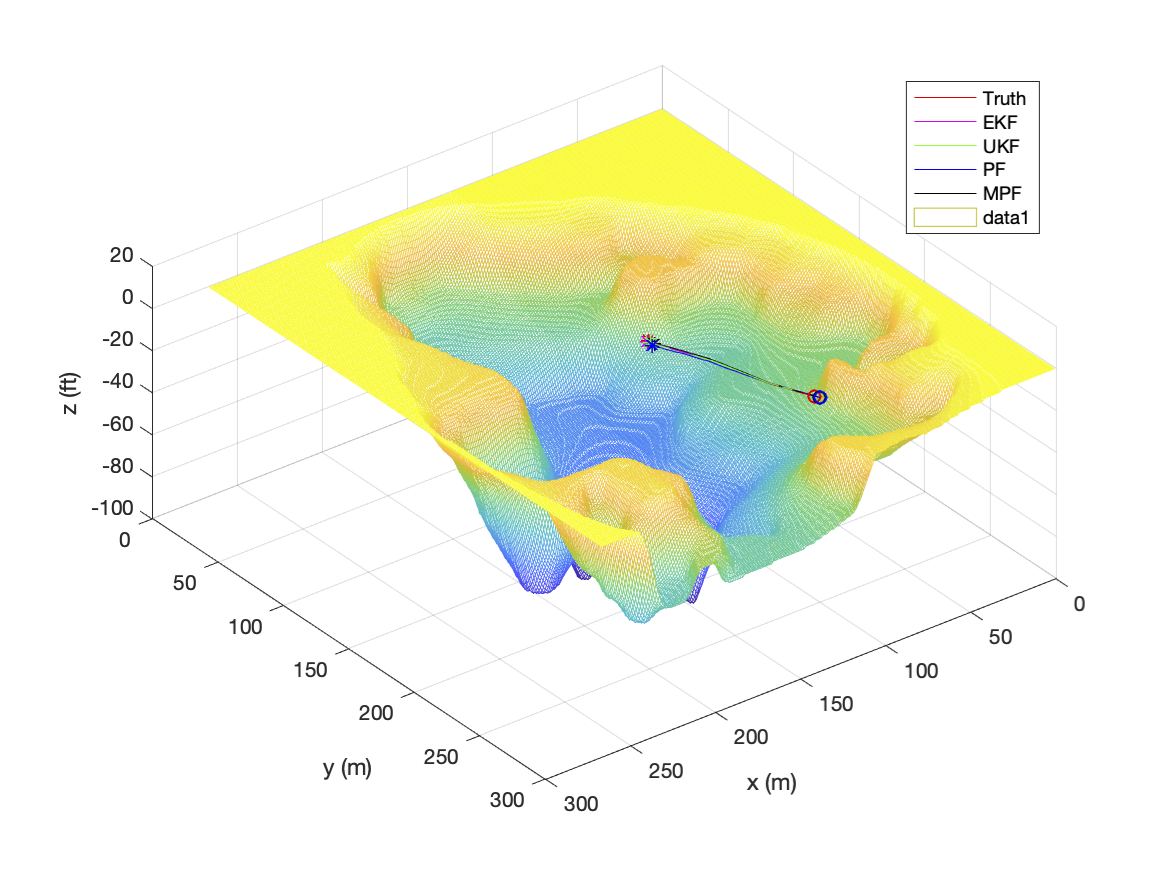
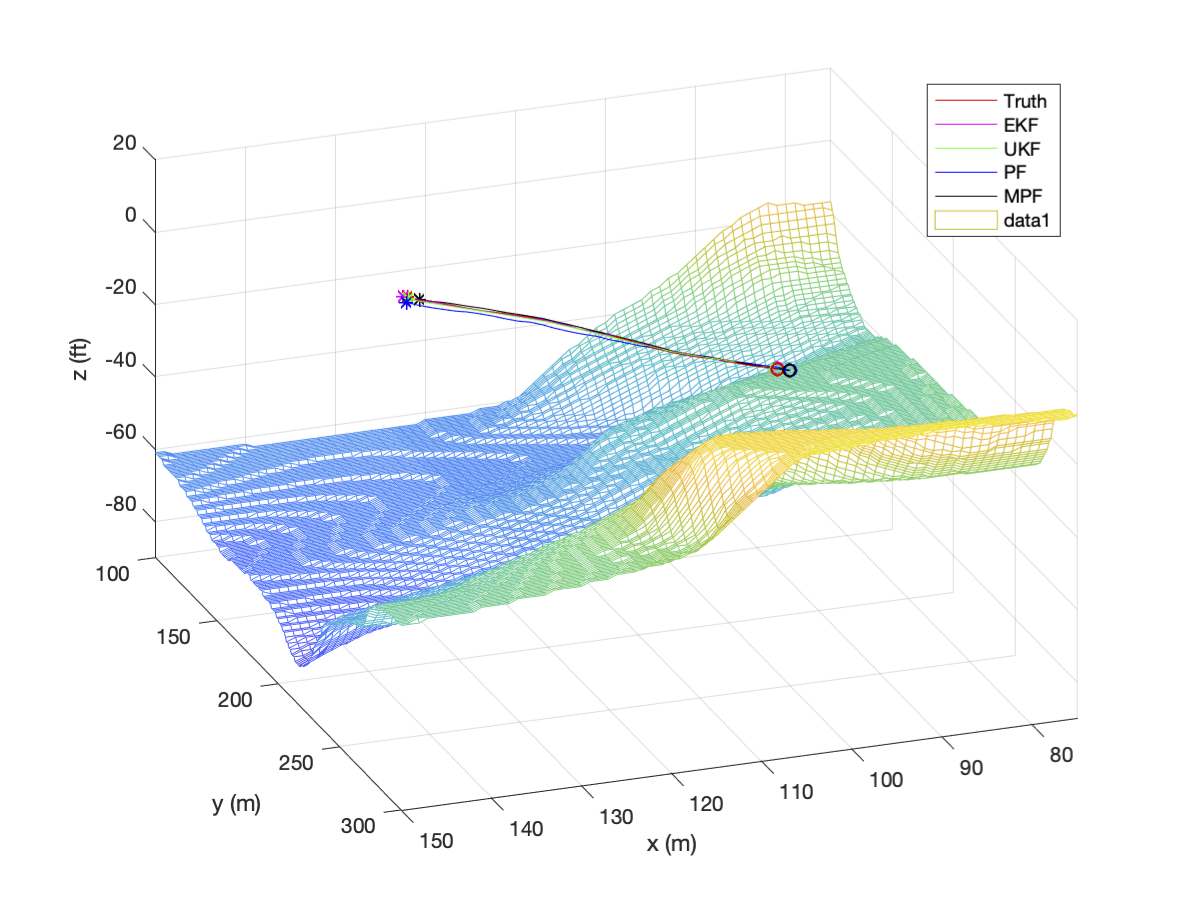
Below figure shows one example run in Lake Bde Maka Ska.
 |
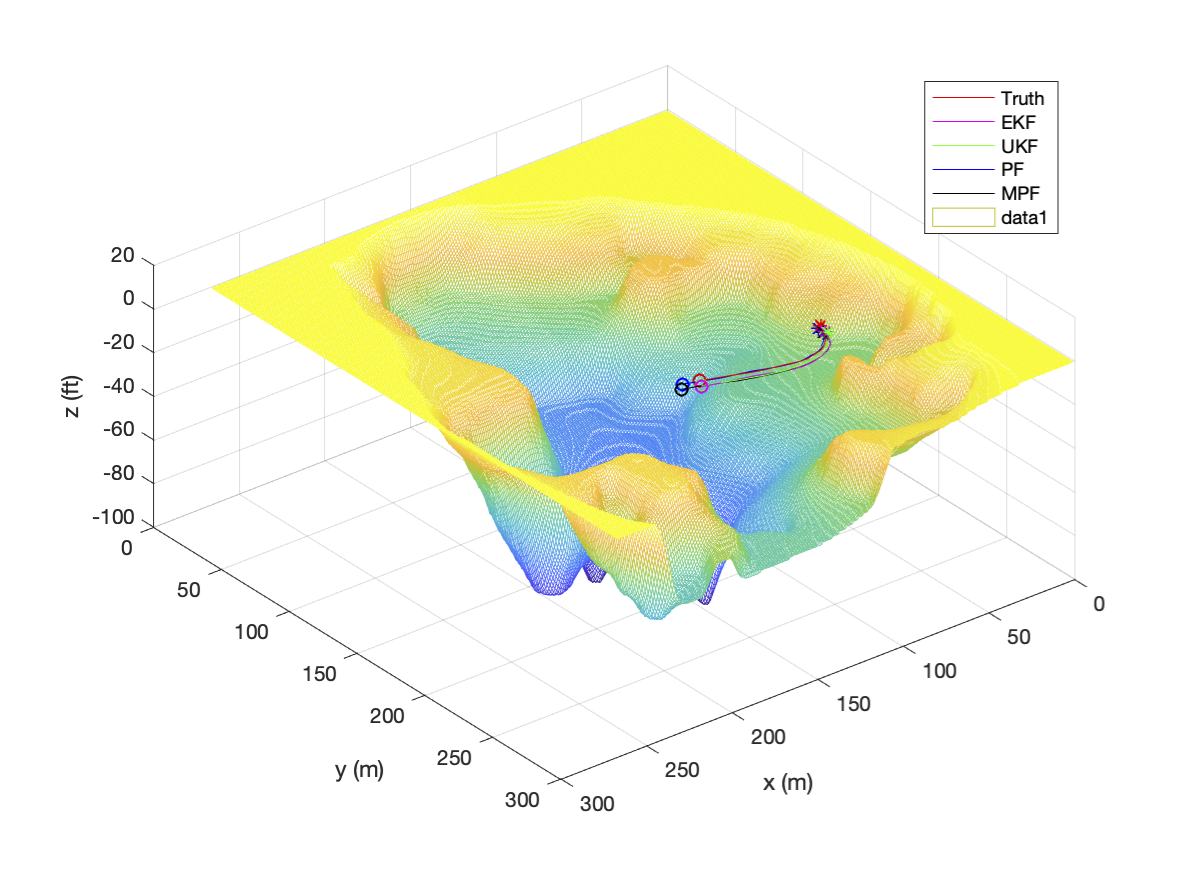 |
| Evaluation of mixed motion estimations with bathymetry data of Lake Bde Maka Ska (top view) | Evaluation of linear motion estimations with bathymetry data of Lake Bde Maka Ska (zoom-in view) |
 |
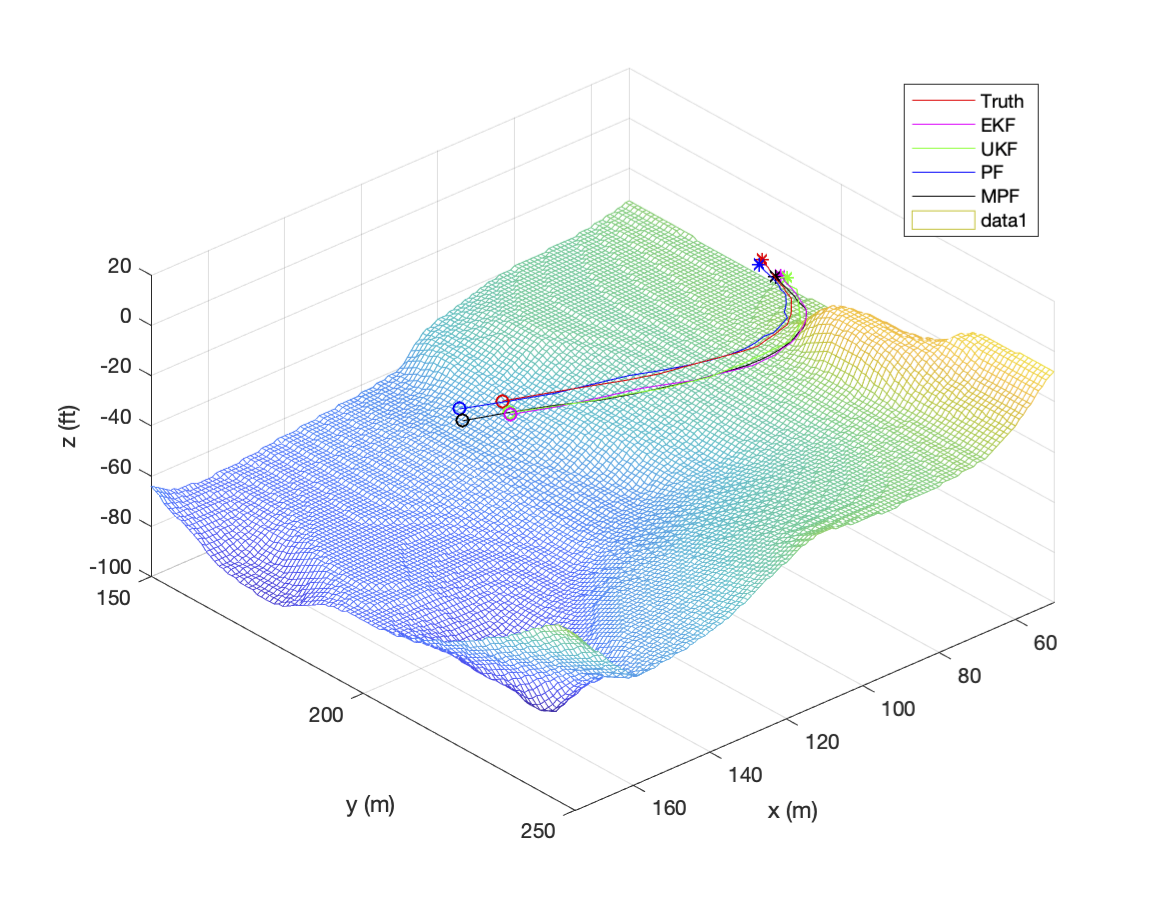 |
| Evaluation of linear motion estimations with bathymetry data of Lake Bde Maka Ska (zoom-in view) | Evaluation of mixed motion estimations with bathymetry data of Lake Bde Maka Ska (zoom-in view) |
The evaluations of each algorithm in various settings are shown below.
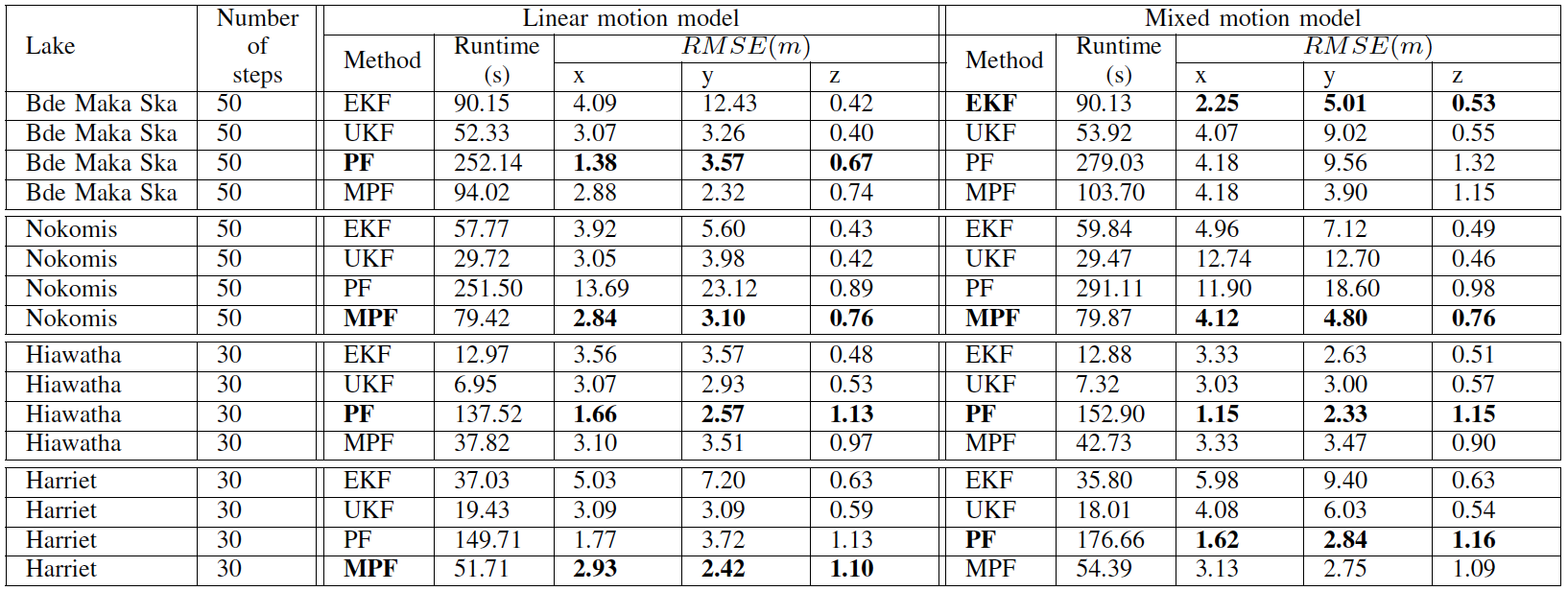
Overall, the MPF and PF outperformed other filters. Although the PF performed best in several cases, it also showed the worst performance in some cases. A possible reason is that the randomly sampled particles may diverge from the ground truth when the given bathymetry data has symmetric substructures or the height does not change enough as the position (x, y) changes. Surprisingly, the UKF estimated the AUV positions well in the linear motion cases although it performed poorly in the nonlinear motion cases.
Future work
Future work will focus on evaluating the performance of the proposed localization algorithms when run on-board AUVs, testing the algorithms on the bathymetry data from other Minnesota lakes, and deploying active acoustic sensors to improve localization accuracy.
Resources
Paper link