Our goal is to enable underwater robots to uniquely identify their human 'teammates' in real time. We also are highly interested in re-identifying people — in other words, if a person leaves the robot's field of view, we want the robot to be able to recognize the person when he or she returns.
We are currently using techniques from multi-object tracking (MOT) and adapting them for the underwater human-robot collaboration use case. Our approach is tracking-by-detection, which means that the robot first detects all divers present, and then determines the identity of each diver detected. The project requires modeling the location, movement, and appearance of each diver to help determine their identity.
We are testing our tracker's performance on data from ocean trials, e.g.:
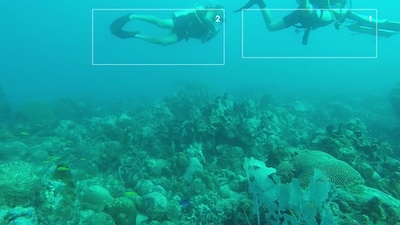 |
Two divers are being tracked with identities "1" and "2." |
 |
Then the divers swim out of view temporarily. |
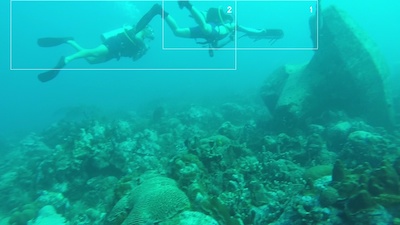 |
When they return, they are correctly re-identified. |
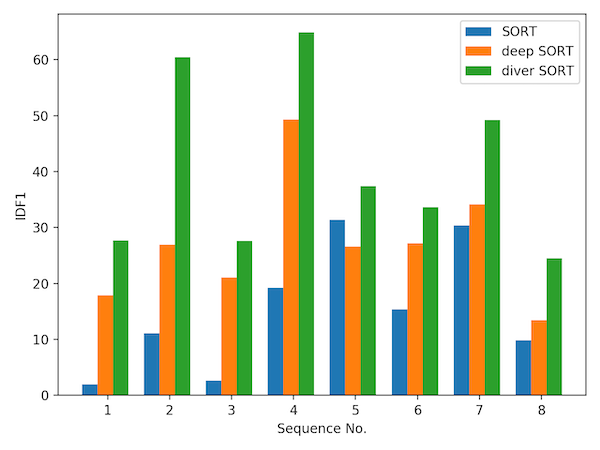
Our tracker outperforms baseline trackers on the IDF1 metric (identification F1 score) in eight tested underwater tracking scenarios:
We are currently working on improving the multi-diver detector, making our tracker robust to detection errors, and improving our tracker's re-identification performance.