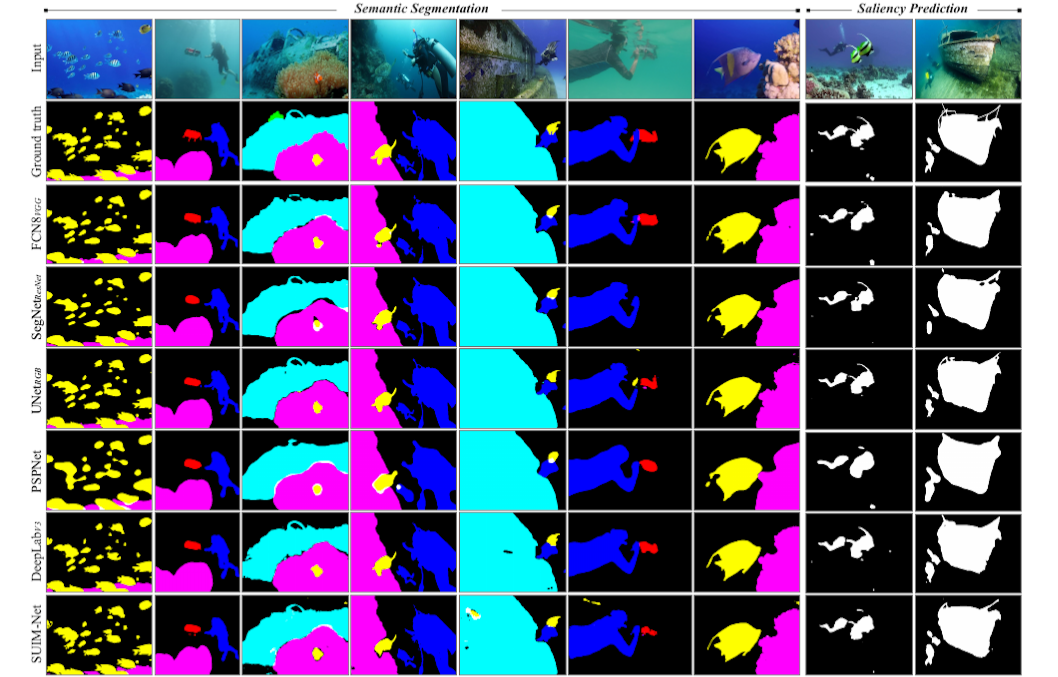
We present the first large-scale dataset for semantic Segmentation of Underwater IMagery (SUIM). It contains over 1500 images with pixel annotations for eight object categories: fish (vertebrates), reefs (invertebrates), aquatic plants, wrecks/ruins, human divers, robots, and sea-floor. The images are rigorously collected during oceanic explorations and human-robot collaborative experiments, and annotated by human participants.

Additionally, we present SUIM-Net, a fully-convolutional deep residual model that balances the tradeoff between performance and computational efficiency. It offers competitive performance while ensuring fast end-to-end inference, which is essential for its use in the autonomy pipeline by visually-guided underwater robots. We also present a comprehensive benchmark evaluation of several state-of-the-art semantic segmentation approaches based on standard performance metrics. With a variety of use cases, the proposed model and benchmark dataset open up promising opportunities for future research on underwater robot vision.
|
Important Pointers: |