Introduction
This project aims to enable visual identification of indvidual divers in an underwater setting. A number of algorithms are available for visually detecting divers (some of which have been our own contribution); however, idenntifying specifc divers underwtaer has always been a challenging task because of diminished visual features and similar apperances of divers. For underwater collaborative missions, a robot would need to identify indivual divers for a number of reasons, for example, to follow the leader of a group of divers in the mission, to accept commands from only permitted individuals, or assist a specific diver in distress.
Major challenges
The main challenge facing this task is twofold:
- Since poses of divers are different from people (such as pedestrains) in terrestrial settings. methods for such detections often are invalidated. The pose of a diver is generally horizontal, where people are predominantly in a vertical posture on land.
- In constrast to terrestrial settings, only few visual features are available based on the fact that robots tend to follow behind a diver whose postures are horizontal, making only part the diver's physique visible. Besides, in most situations, the quality of the vision in water (partiuclarly in the ocean and open-water environments) tend to be worse than the vision on land because of degraded optics.
Methodology
- Detection of diver underwater: Use Faster R-CNN or any other deep detection model to get a bounding box for each diver in the scene.
- Feature vector construction: a feature vector is contructed for each bounding box using a collection of the following visual/image features: Convex hull, edge contours, image moments, average color distribution (LAB color space) and average amplitude of spatial frequency.
- Diver classification: using K-Means clustering to group and classify divers based on feature similarity.
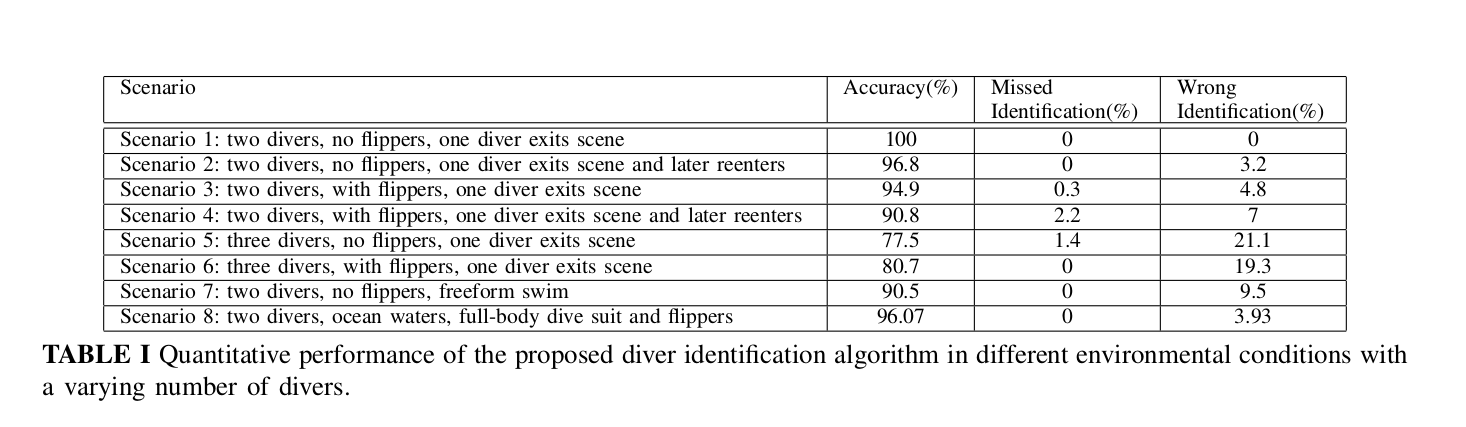
Experimental results:
Github link to our project code :https://github.com/xiaxx244/diver_detection.git
(A paper titled "Visual diver identification for underwater human-robot collaboration" is currently under review for ICRA 2019.)