Adaptive Landmark Color for AUV Docking in Visually Dynamic Environments
Abstract
Autonomous Underwater Vehicles (AUVs) conduct missions underwater without the need for human intervention. A docking station (DS) can extend mission times of an AUV by providing a location for the AUV to recharge its batteries and receive updated mission information. Various methods for locating and tracking a DS exist, but most rely on expensive acoustic sensors, or are vision-based, which is significantly affected by water quality. We present a vision-based method that utilizes adaptive color LED markers and dynamic color filtering to maximize landmark visibility in varying water conditions. Both AUV and DS utilize cameras to determine the water background color in order to calculate the desired marker color. No communication between AUV and DS is needed to determine marker color. Experiments conducted in a pool and lake show our method performs 10 times better than static color thresholding methods as background color varies. DS detection is possible at a range of 5 meters in clear water with minimal false positives.
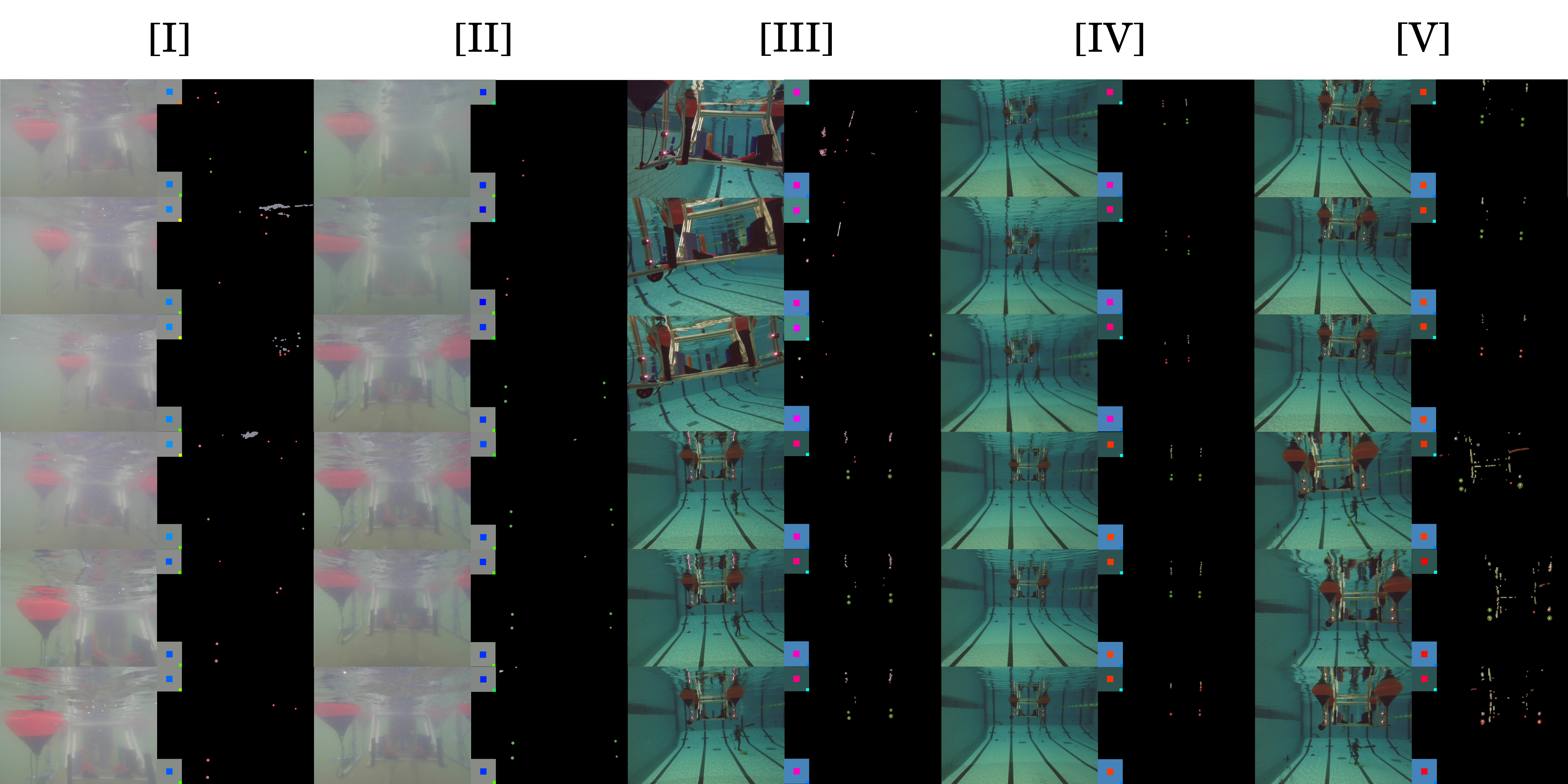
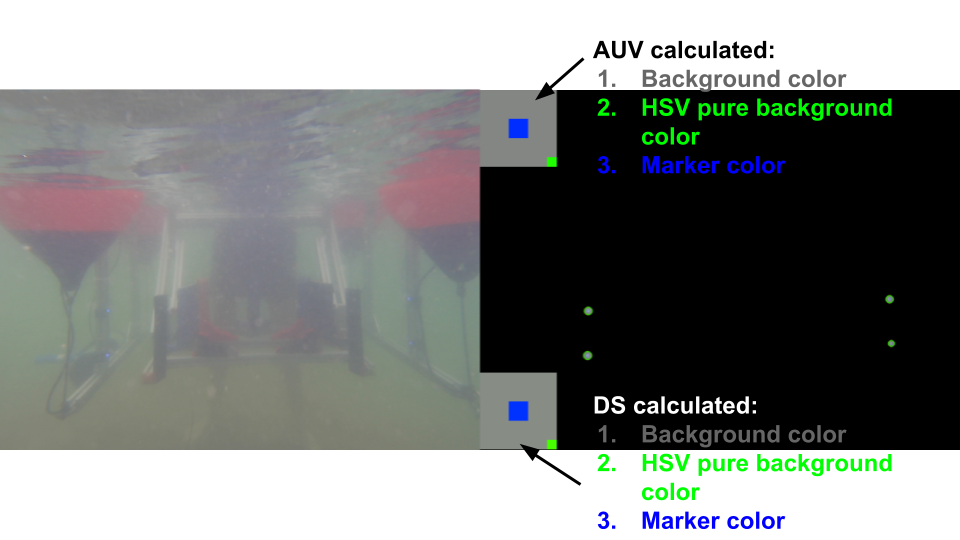
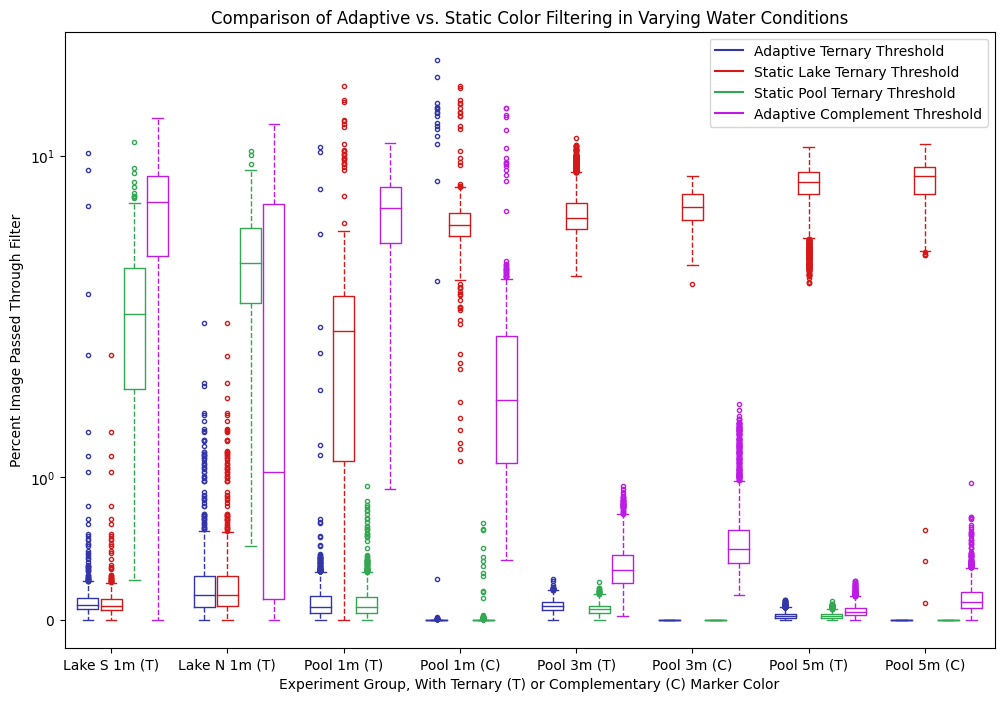
Two adaptive marker color mapping functions are evaluated: ternary and complementary color mapping. Our experiments show adaptive ternary color filtering outperforms static color filtering by >10x as the water background varies. For more details, see our paper on arXiv - https://arxiv.org/pdf/2310.02944.pdf