Many methods of robot-to-human communication are either impossible or less effective underwater than they are in terrestrial environments. Digital displays are often smaller and harder to read, synthetic spoken language is difficult to understand, and simple light displays can be difficult to see underwater and interpret. Additionally, operating an AUV underwater with a controller device is difficult, due to the limited range (<20cm) of wireless RF communications. Lastly, modifying an AUV to add a dedicated HRI device of some kind is often not possible, due to the limited space and power constraints that AUVs typically have.
Motion is a highly expressive vector of communication that is already used by most humans in their daily communication. Robots also make use of motion for communication, but mostly when the robot is humanoid (facial expressions, hand/arm/head gestures). Applying motion for communication with non-humanoid robots is a challenge and has not been done for AUVs.
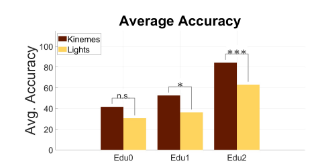
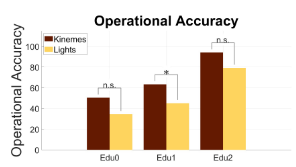
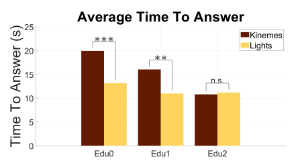
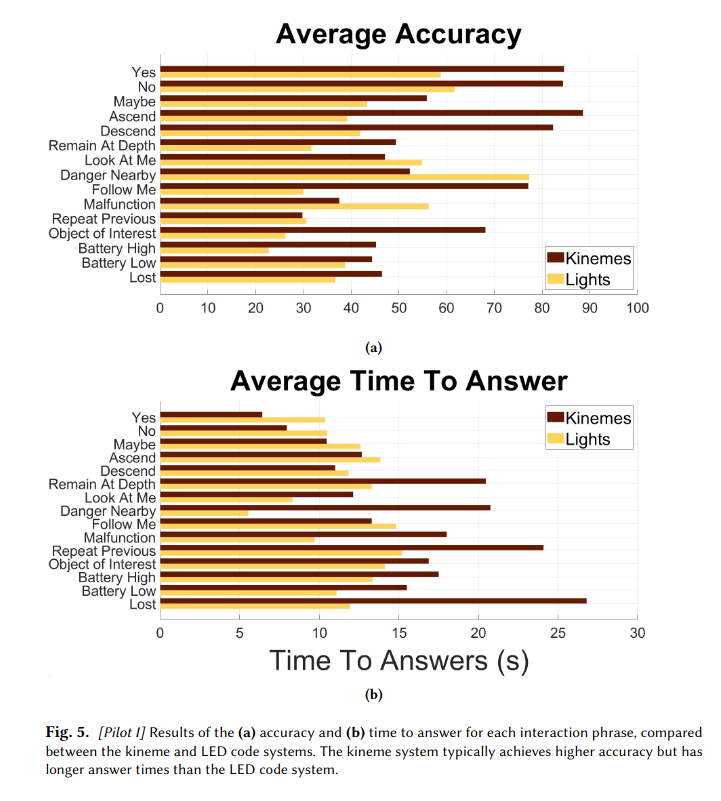
Our method, Robot Communication Via Motion (RCVM), is the first method for robot motion-based communication for AUVs. Our initial attempts to test this method in simulation produced promising results (shown below). Our method outperformed a light-based communication system at all levels of education (no training, being told the list of possible phrases, being shown the possible phrases), with some variation on the per-kineme level.
After validating RCVM in simulation, we implemented it onboard the Aqua AUV and tested it in an in-person and online study, comparing it with three other communication methods. The results from those studies are complex, but generally show that RCVM operates with reasonable accuracy compared to other methods, and is more easily understood at challenging distances and viewpoint orientations. For more details, please see our THRI paper at: https://dl.acm.org/doi/10.1145/3495245