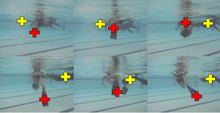
| 2026 | Diver Interest via Pointing in Three Dimensions: 3D Pointing Reconstruction for Diver-AUV Communication Chelsey Edge, Demetrious Kutzke, Megdalia Bromhal, and Junaed Sattar Autonomous Robots volume 50, number 23 (2026). https://doi.org/10.1007/s10514-026-10246-7
| |||
AMP2026: A Multi-Platform Marine Robotics Dataset for Tracking and Mapping Edwin Meriaux, Shuo Wen, David Widhalm, Zhizun Wang, Junming Shi, Mariana Sosa Guzmán, Kalvik Jakkala, Bennett A. Carley, Elias Sokolova, Yogesh Girdhar, Monika Roznere, Jason O'Kane, Junaed Sattar, Gregory Dudek Accepted for publication in the 23rd Conference on Robots and Vision (CRV 2026), Vancouver, BC, Canada, May 25, 2026. | ||||
Robotic Estimation of Single Scuba Diver Respiration Rate for Safety in Underwater Human-Robot Collaboration Demetrious Kutzke, Vennela Dupati, and Junaed Sattar The International Journal of Robotics Research. 2026;0(0) (OnlineFirst edition). doi:10.1177/02783649251411466.
| ||||
Leveraging Cost-effective Robotics for K-12 STEM Education through Water Quality Monitoring Tasks Rishi Mukherjee, Andrew Ruiz, Travis Henderson, Resha Tejpaul, Kris Simonson, David Mulla, Brian McNeill, Nikos Papanikolopoulos, Junaed Sattar Accepted for publication in the IEEE International Conference on Robotics and Automation (ICRA 2026), Vienna, Austria, June 1-5, 2026.
| ||||
Semantically-Aware Diver Activity Recognition Framework for Effective Underwater Multi-Human-Robot Collaboration Sadman Sakib Enan, Junaed Sattar Accepted for publication in the IEEE International Conference on Robotics and Automation (ICRA 2026), Vienna, Austria, June 1-5, 2026. | ||||
Robotic Classification of Divers’ Swimming States using Visual Pose Keypoints as IMUs Demetrious Kutzke, Ying-Kun Wu, Elizabeth Terveen, Junaed Sattar Accepted for publication in the IEEE International Conference on Robotics and Automation (ICRA 2026), Vienna, Austria, June 1-5, 2026. | ||||
| 2025 | Robotic Detection of Deformed Objects for Marine Debris Management Sakshi Singh, Junaed Sattar In proceedings of the IEEE/MTS OCEANS Conference & Exposition Great Lakes, Chicago, IL, USA.. September-October 2025, Pages 01-10, doi: 10.23919/OCEANS59106.2025.11245031. | |||
Semantic Risk Assessment in Visual Scenes for AUV-Assisted Marine Debris Removal Sakshi Singh, Junaed Sattar In proceedings of the IEEE/RSJ International Conference Intelligent Robots and Systems (IROS2025), Hangzhou, China. October 2025, Pages 16322-16328, doi: 10.1109/IROS60139.2025.11247431. | ||||
One-Shot Gesture Recognition for Underwater Diver-To-Robot Communication Rishikesh Joshi, Junaed Sattar In proceeding of the IEEE/RSJ International Conference Intelligent Robots and Systems (IROS2025), Hangzhou, China. October 2025, Pages 20247-20254, doi: 10.1109/IROS60139.2025.11247305. | ||||
The Common Objects Underwater (COU) Dataset for Robust Underwater Object Detection Rishi Mukherjee*, Sakshi Singh, Jack McWilliams, Junaed Sattar In proceedings of the IEEE/RSJ International Conference Intelligent Robots and Systems (IROS2025), Hangzhou, China. October 2025, Pages 18597-18603, doi: 10.1109/IROS60139.2025.11246089. | ||||
Design and Development of the MeCO Open-Source Autonomous Underwater Vehicle David Widhalm, Cory Ohnsted, Corey Knutson, Demetrious Kutzke, Sakshi Singh, Rishi Mukherjee, Grant Schwidder, Ying-Kun Wu, Junaed Sattar | Preprint | |||
A Real-To-Sim-To-Real Approach to Enhance Robotic System Characterization David Widhalm, Junaed Sattar Accepted for publication at the 19th International Symposium on Experimental Robotics (ISER2025), Santa Fe, NM, USA. July 2025. | ||||
Stereo-Based 3D Human Pose Estimation for Underwater Robots Without 3D Supervision Ying-Kun Wu and Junaed Sattar | Paper | |||
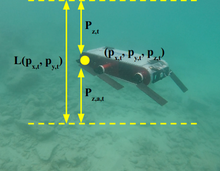
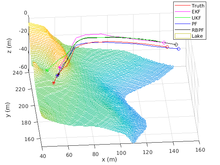
A Quantitative Evaluation of Bathymetry-based Bayesian Localization Methods for Autonomous Underwater Robots Jungseok Hong, Michael Fulton, Kevin Orpen, Kimberly Barthelemy, Keara Berlin, and Junaed Sattar
| ||||
IBURD: Image Blending for Underwater Robotic Detection Jungseok Hong, Sakshi Singh, and Junaed Sattar | Preprint | |||
| 2024 | An Evaluation of Occupancy Sensing Methods for Autonomous Underwater Vehicle Docking Brock Schmertman | Report | ||
Vision-Based Computational Methods Towards Effective Underwater Multi-Human-Robot Interaction Sadman Sakib Enan | Thesis | |||
Toward Visual Communication Methods for Underwater Human-Robot Interaction Chelsey Edge | Thesis | |||
Diver Identification Using Anthropometric Data Ratios for Underwater Multi-Human-Robot Collaboration Jungseok Hong, Sadman Sakib Enan, and Junaed Sattar
| Paper | |||
Adaptive Landmark Color for AUV Docking in Visually Dynamic Environments Corey Knutson, Zhipeng Cao, and Junaed Sattar
| ||||
Autonomous Robotic Re-alignment for Face-to-Face Underwater Human-Robot Interaction Demetrious T. Kutzke, Ashwin Warriar, and Junaed Sattar
| PrePrint | |||
| 2023 | SIREN: Underwater Robot-To-Human Communication Using Audio Michael Fulton, Junaed Sattar, and Rafa Absar*
| Paper | ||
Toward Robotic Autonomy in Data-Scarce and Visually Challenging Environments Jungseok Hong. | Thesis | |||
Natural, Robust, and Multi-Modal Human-Robot Interaction For Underwater Robots Michael Scott Fulton. | Thesis | |||
HREyes: Design, Development, and Evaluation of A Novel Method for AUVs to Communicate Information and Gaze Direction Michael Fulton, Aditya Prabhu, and Junaed Sattar. | Paper | |||
Diver Interest via Pointing: Human-Directed Object Inspection for AUVs Chelsey Edge and Junaed Sattar.
| Paper | |||
A Floating Dock for Autonomous Underwater Vehicles, The SeaCube Jordan Zumberge | ||||
| 2022 | Robotic Detection of a Human-Comprehensible Gestural Language for Underwater Multi-Human-Robot Collaboration Sadman Sakib Enan, Michael Fulton, and Junaed Sattar. | Paper | ||
SVAM: Saliency-guided Visual Attention Modeling by Autonomous Underwater Robots Md Jahidul Islam, Ruobing Wang, and Junaed Sattar. In proceedings of the Robotics: Science and Systems Conference XVIII (RSS 2022), New York, NY, June 2022. | Paper Project Code |














Underwater Robot-To-Human Communication Via Motion: Implementation and Full-Loop Human Interface Evaluation Michael Fulton, Muntaqim Mehtaz, Owen Queeglay, and Junaed Sattar. | Paper Project | ||||
Towards a Fast, Robust and Accurate Visual-Inertial Simultaneous Localization and Mapping System Jiawei Mo Ph. D. Thesis, May 2022 | Thesis | ||||
Robot Communication Via Motion: A Study on Modalities for Robot-to-Human Communication in the Field Michael Fulton, Chelsey Edge and Junaed Sattar ACM Transactions on Human-Robot Interaction. Volume 11, Issue 2, No. 15, Pages 1-40, June 2022. https://doi.org/10.1145/3495245 | Paper .bib | ||||
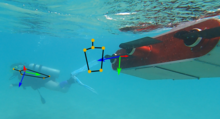
| Using Monocular Vision and Human Body Priors for AUVs to Autonomously Approach Divers Michael Fulton, Jungseok Hong and Junaed Sattar In proceedings of the IEEE International Conference on Robotics and Automation (ICRA 2022). Philadelphia, PA, USA. May 2022, Pages 1076-1082, doi: 10.1109/ICRA46639.2022.9811905. | Paper .bib | ||||
| ROW-SLAM: Under-Canopy Cornfield Semantic SLAM Jiacheng Yuan, Jungseok Hong, Junaed Sattar, and Volkan Isler. In proceedings of the IEEE International Conference on Robotics and Automation (ICRA 2022). Philadelphia, PA, USA. May 2022, Pages 2244-2250, doi: 10.1109/ICRA46639.2022.9811745. | Paper | ||||
| Continuous-Time Spline Visual-Inertial Odometry Jiawei Mo and Junaed Sattar. In proceedings of the IEEE International Conference on Robotics and Automation (ICRA 2022). Philadelphia, PA, USA. May 2022, Pages 9492-9498, doi: 10.1109/ICRA46639.2022.9811586. | |||||
| 2021 | Fast Direct Stereo Visual SLAM Jiawei Mo, Md Jahidul Islam and Junaed Sattar IEEE Robotics and Automation Letters (RA-L). Vol. 7, No. 2, Pages 778-785, April 2022, doi: 10.1109/LRA.2021.3133860. Early Access Area. | ||||
IMU-Assisted Learning of Single-View Rolling Shutter Correction Jiawei Mo, Md Jahidul Islam and Junaed Sattar The Fifth Conference on Robot Learning (CoRL 2021). Hybrid Conference (London, England). November 2021. | |||||
Predicting the Future Motion of Divers for Enhanced Underwater Human-Robot Collaboration Tanmay Agarwal, Michael Fulton and Junaed Sattar Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2021). Virtual Conference (Prague, Czech Republic). Pages 5379-5386, doi: 10.1109/IROS51168.2021.9636374. | Paper .bib | ||||
Towards Robust Visual Diver Detection Onboard Autonomous Underwater Robots: Assessing the Effects of Models and Data Karin de Langis, Michael Fulton and Junaed Sattar Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2021). Virtual Conference (Prague, Czech Republic). Pages 5372-5378, doi: 10.1109/IROS51168.2021.9636099. | Paper .bib | ||||
Machine Vision for Improved Human-Robot Cooperation in Adverse Underwater Conditions Md. Jahidul Islam Ph. D. Thesis, May 2021 | Thesis | ||||
Towards Natural Underwater Human-Robot Interaction: Pointing Gesture Recognition for Autonomous Underwater Vehicles Andrea M. Walker Ms.C. Thesis (Plan A), May 2021 | Thesis | ||||
Control System Development for LoCO AUV Kimberley Barthelemy | Thesis | ||||
Dynamic Modeling and Simulation of an Autonomous Underwater Vehicle (AUV) Kevin Orpen | Thesis | ||||
The LoCO Low-Cost, Open-Source, Autonomous Underwater Robot The Interactive Robotics and Vision Laboratory | GitHub Landing Page | ||||
Robot-to-Robot Relative Pose Estimation using Humans as Markers Md Jahidul Islam, Jiawei Mo and Junaed Sattar Autonomous Robots 45, 579–593 (2021). https://doi.org/10.1007/s10514-021-09985-6 | |||||
Semantically-Aware Strategies for Stereo-Visual Robotic Obstacle Avoidance Jungseok Hong, Karin de Langis, Cole Wyeth, Christopher Walaszek, and Junaed Sattar Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Xi'an, China, 2021, Pages. 2450-2456, doi: 10.1109/ICRA48506.2021.9561863.2021. | Paper | ||||
| 2020 | TrashCan: A Semantically-Segmented Dataset towards Visual Detection of Marine Debris Jungseok Hong, Michael Fulton, Junaed Sattar | ||||
Monocular Depth Estimation using Adversarial Training Master's Thesis (Plan A) | Thesis GitHub | ||||
Power-On-and-Go Capabilities for a Low-Cost Modular Autonomous Underwater Vehicle Chelsey Edge, Sadman Sakib Enan, Michael Fulton, Jungseok Hong, Junaed Sattar Robotics: Science and Systems (RSS) 2020 Workshop on Power On and Go Robots. Virtual RSS 2020. | Paper | ||||
Examining the Performance of Scale Optimized Visual Odometry in Simulated Underwater Environments Master's Project Report (Plan B) | Report | ||||
Augmenting Electrocardiogram Datasets using Generative Adversarial Networks Master's Thesis (Plan A) | Thesis | ||||
Md Jahidul Islam, Peigen Luo, Junaed Sattar Robotics: Science and Systems (RSS) 2020. https://doi.org/10.15607/RSS.2020.XVI.018 | Project Code PrePrint | ||||
Design and Experiments with LoCO AUV: A Low-Cost Open-Source Autonomous Underwater Vehicle Chelsey Edge, Sadman Sakib Enan, Michael Fulton, Jungseok Hong, Jiawei Mo, Kimberly Barthelemy, Hunter Bashaw, Berik Kallevig, Corey Knutson, Kevin Orpen, Junaed Sattar. Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020. Virtual Conference (Las Vegas, Nevada, USA). Pages 1761-1768, doi: 10.1109/IROS45743.2020.9341007. | Project Paper Bib | ||||
Semantic Segmentation of Underwater Imagery: Dataset and Benchmark Md Jahidul Islam , Chelsey Edge , Yuyang Xiao, Peigen Luo, Muntaqim Mehtaz , Christopher Morse, Sadman Sakib Enan and Junaed Sattar Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020. Virtual Conference (Las Vegas, Nevada, USA). Pages 1769-1776, doi: 10.1109/IROS45743.2020.9340821. | Project Code Preprint | ||||
A Fast and Robust Place Recognition Approach for Stereo Visual Odometry using LiDAR Descriptors Jiawei Mo and Junaed Sattar. Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020. Virtual Conference (Las Vegas, Nevada, USA). Pages 5893-5900, doi: 10.1109/IROS45743.2020.9341733. | |||||
Real-Time Multi-Diver Tracking and Re-identification for Underwater Human-Robot Collaboration Karin de Langis and Junaed Sattar. Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), 2020, Virtual Conference (Paris, France, May-June 2020). Pages 11140-11146. | |||||
Fast Underwater Image Enhancement for Improved Visual Perception Md Jahidul Islam, Youya Xia, and Junaed Sattar. IEEE Robotics and Automation Letters (RA-L), vol. 5, no. 2, pp. 3227-3234, 2020. | Project Code Bib Paper | ||||
A Generative Approach Towards Improved Robotic Detection of Marine Litter Jungseok Hong, Michael Fulton, and Junaed Sattar. Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), 2020, Virtual Conference (Paris, France, May-June 2020). Pages 10525-10531.
| Project | ||||
Md Jahidul Islam, Sadman Sakib Enan, Peigen Luo, Junaed Sattar Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), 2020, Virtual Conference (Paris, France, May-June 2020). Pages 900-906. | Project Code Bib Preprint | ||||
| 2019 | Md Jahidul Islam, Jungseok Hong, and Junaed Sattar International Journal of Robotics Research (IJRR), 2019, doi: 10.1177/0278364919881683. [Impact Factor: 6.134] | ||||
Jiawei Mo, Junaed Sattar Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2019, Macau SAR, China, November 2019. Pages 6921-6927. | |||||
Unmonitored Fault Detection in an AUV Using Recurrent Neural Networks Marc Ho UMN undergraduate honors thesis, Spring 2019 | |||||
By Land, Air, or Sea: Multi-Domain Robot Communication Via Motion Michael Fulton, Mustaf Ahmed, and Junaed Sattar | |||||
| 2018 | Michael Fulton, Chelsey Edge, and Junaed Sattar Proceedings of the IEEE International Conference on Robotics and Automation, (ICRA) 2019, Montreal, Quebec, Canada. May-June 2019. Pages 4660-4666.
| ||||
Md Jahidul Islam, Michael Fulton, and Junaed Sattar IEEE Robotics and Automation Letters (RA-L), vol. 4, no. 2, pp. 113-120, 2018. | |||||
Md Jahidul Islam, Marc Ho and Junaed Sattar. Journal of Field Robotics (JFR), 2018, doi: 10.1002/rob.21837. [Impact Factor: 4.345] | |||||
Michael Fulton, Jungseok Hong, Md Jahidul Islam, and Junaed Sattar Proceedings of the IEEE International Conference on Robotics and Automation (ICRA) 2019, Montreal, Quebec, Canada. May-June 2019. Pages 5752-5758.
| |||||
Youya Xia and Junaed Sattar Proceedings of the IEEE International Conference on Robotics and Automation (ICRA) 2019, Montreal, Quebec, Canada. May-June 2019. Pages 6839-6845.
| Pre-print | ||||
Cameron Fabbri, Md Jahidul Islam, and Junaed Sattar Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), 2018, Brisbane, Australia. May-June 2018. Pages 7159-7165. | |||||
Junaed Sattar and Gregory Dudek Autonomous Robots. vol. 42 (1), Pages 111-124, 2018, doi: 10.1007/s10514-017-9644-y. [Impact factor: 3.634]
| |||||
| 2017 | Md Jahidul Islam, Marc Ho, and Junaed Sattar Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), 2018. Brisbane, Australia. May-June 2018. Pages 6212-6219. | ||||
Florian Shkurti, Wei-Di Chang, Peter Henderson, Md Jahidul Islam, Juan Camilo Gamboa Higuera, Jimmy Li, Travis Manderson, Anqi Xu, Gregory Dudek, and Junaed Sattar Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2017, Vancouver, BC, Canada. September 2017. Pages 4189-4196. | |||||
Md Jahidul Islam and Junaed Sattar Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), 2017, Singapore. May-June 2017. Pages 4457--4464. | |||||
SafeDrive: A Robust Lane Tracking System for Autonomous and Assisted Driving Under Limited Visibility Jiawei Mo and Junaed Sattar
| |||||
| 2016 | Cameron Fabbri and Junaed Sattar Proceedings of the Conference on Computer and Robot Vision (CRV), 2016, Victoria, BC, Canada. June 2016. Pages 376-382. |