To run the GUI for manually setting leg angles (and other parameters):
rosrun aqua_gait test_gaits_gui
The first section, Curr Leg States, will show what the software thinks are the current leg angles (read from the encoders). When the GUI opens, you need to click on the Curr Gait checkbox in the
ROS Publisher section (should be set to FLEXIBLE-SINE, see attached picture)
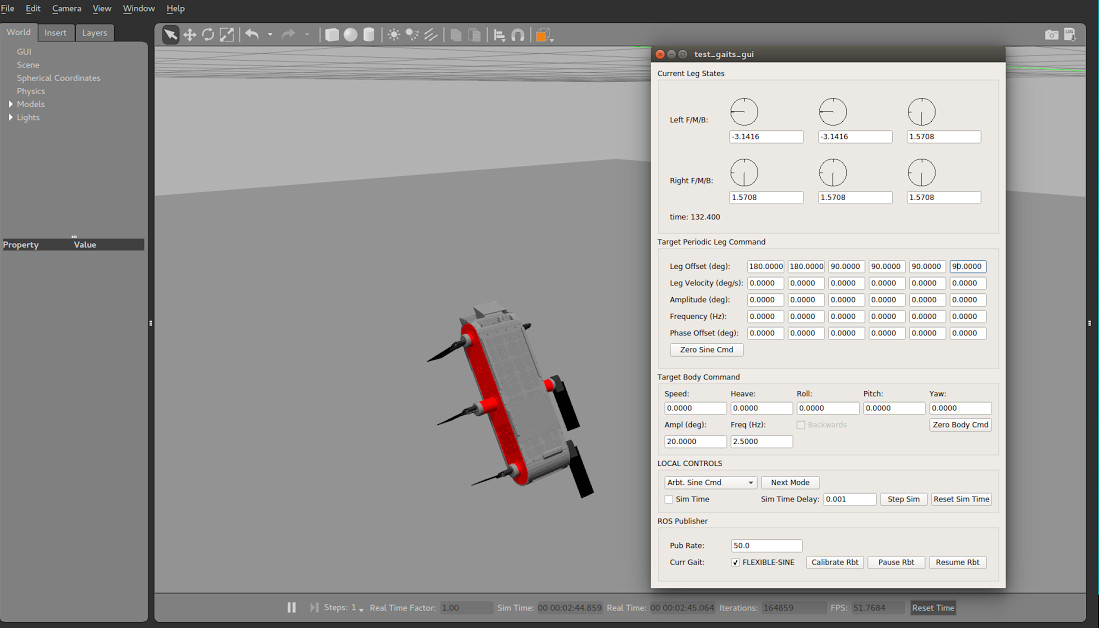
On the same section, you also need to set the publishing rate to something greater than 0 (e.g. 50). After this is done, you should be able to set the leg offsets to test if there is some systematic error, on the Target Periodic Leg Command Section.
You also need to set the mode to Arbt. Sine Cmd on the drop-down menu in the LOCAL CONTROLS section.